mid-size robo soccer music
- kineto-akustische Performance mit autonomen Fussballrobotern der Robo Cup Mid Size League, ausgestattet mit speziellen Soundmodulen zur Erzeugung einer komplexen Klangstruktur
- Idee und Komposition: Ralf Hoyer
- technische Konzeption, Realisierung und Komposition: Andre Bartetzki
- Uraufführung: 2013, Festival "Unmenschliche Musik - Kompositionen von Maschinen, Tieren und Zufällen" im Haus der Kulturen der Welt, Berlin.
Performances
"Mid-Size Robots", die ansonsten in der weltweiten Roboter-Fußball-Liga gegeneinander antreten, setzen eine Auseinandersetzung mit der von Neurowissenschaftlern erträumten Vermenschlichung von Service-Maschinen in Gang. Umfunktioniert zu Musikinstrumenten, erzeugen sie beim Spielen eine durch Faktoren wie Bewegung, Position oder Abstand zum Gegner definierte Matrix musikalischer Informationen. Nebeneffekt des Fußballspiels oder gemeinsames Werk der auf Teamwork programmierten Spiel-Maschinen?
mid-size robo soccer music wurde für das Festival Unmenschliche Musik im Februar 2013 im Haus der Kulturen der Welt in Berlin realisiert. An den vier Abenden des Festivals fand jeweils ein Spiel der beiden Teams aus den Niederlanden und Deutschland statt. Eine Halbzeit dauerte dabei, wegen der begrenzten Akkulaufzeiten aber auch wegen des umfangreichen Programms des Festivals, nur 10 Minuten.
Teams:
Techunited / Technische Universität Eindhoven (Niederlande)
Carpe Noctem / Universität Kassel
Bild- und Klangbeispiele
| Videoaufnahmen | |
Beim "Training" im Lab der Uni Kassel: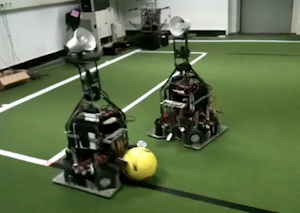 |
Videozusammenschnitt von Ralf Hoyer: |
1. Spiel Donnerstag, 1. Halbzeit: |
1. Spiel Donnerstag, 2. Halbzeit: |
2. Spiel Freitag, 1. Halbzeit: |
2. Spiel Freitag, 2. Halbzeit: |
3. Spiel Samstag, 1. Halbzeit: |
3. Spiel Samstag, 2. Halbzeit: |
4. Spiel Sonntag, 1. Halbzeit: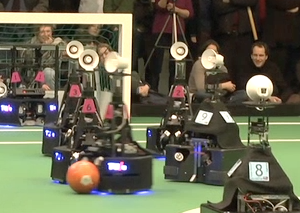 |
4. Spiel Sonntag, 2. Halbzeit: |
Anmerkungen zur Realisation
Ein Fußballteam in der mid-size league besteht aus 4 Feldspielern und einem Torwart. Die äußere Form, die Konstruktion, die Elektromechanik und die Software dieser Fußballroboter unterliegen nur wenigen Vorgaben und Bedingungen und können ansonsten frei von den jeweiligen Entwicklern - zumeist Robotik-Fachbereiche an Universitäten - frei gestaltet werden. Die Spielregeln sind von denen der FIFA abgeleitet. Neben der middle-size league bestehen noch viele andere Arten des Roboterfußballs.
In unserer Performance traten zwei Teams gegeneinander an: Techunited von der Technischen Universität Eindhoven (robocup Weltmeister 2012) und Carpe Noctem von der Universität Kassel.
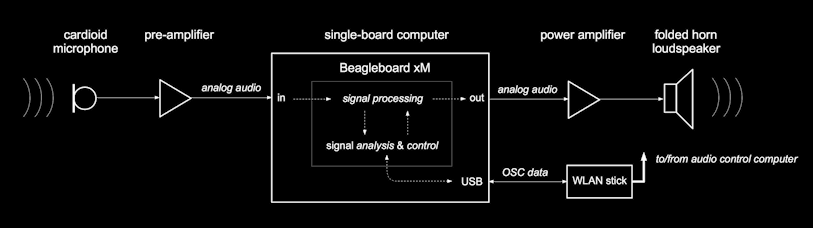
Jeder der insgesamt 10 autonomen Roboter wurde mit einem von uns entwickelten Soundmodul ausgestattet, das die Echtzeitverarbeitung von Audio- und Steuersignalen in einem Netzwerk ermöglichte. Jedes Modul bestand aus einem zentralen Einplatinen-Computer (Beagleboard xM) mit Ubuntu-Betriebssystem und Satellite-CCRMA-Software, einem Elektret-Nierenmikrofon mit Vorverstärker für die Aufnahme der Umgebungsgeräusche, einem einfachen Druckkammerlautsprecher mit Leistungsverstärker sowie WLAN-Stick für die Netzwerkkommunikation und Lithium-Ionen-Modellbauakku und Spannungswandler für die Stromversorgung. Da beide Teams sehr unterschiedliche Konstruktionen für ihre Maschinen entwickelt haben und sich die Gestalten von Feldspielern und Torwarten aufgrund ganz anderer Anforderungen sehr voneinander unterscheiden, mussten schließlich 5 konstruktiv verschiedene Ausführungen des Soundmoduls gebaut werden.
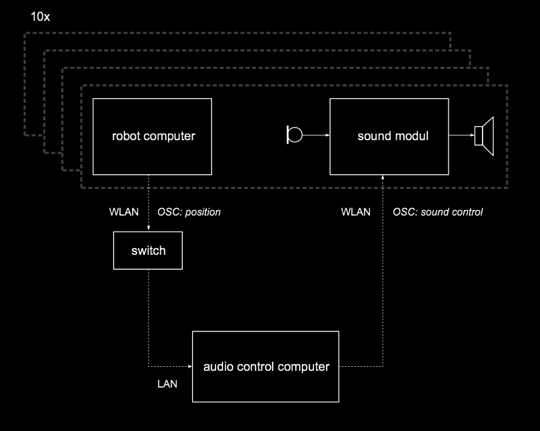
Jeder Roboter lieferte einem zentralen Audiosteuercomputer seine Positionsdaten und von beiden Teams erhielten wir außerdem die vom jeweiligen Team gemeinsam berechnete Position des Balls. Diese Daten wurden im Audiosteuercomputer in Geschwindigkeits- und Entfernungsdaten (z.B. zum Ball, zum Tor etc.) umgerechnet und an die 10 Soundmodule weitergeleitet. Empfang und Weiterleitung diese Daten erfolgte mit dem OpenSoundControl-Protokoll.
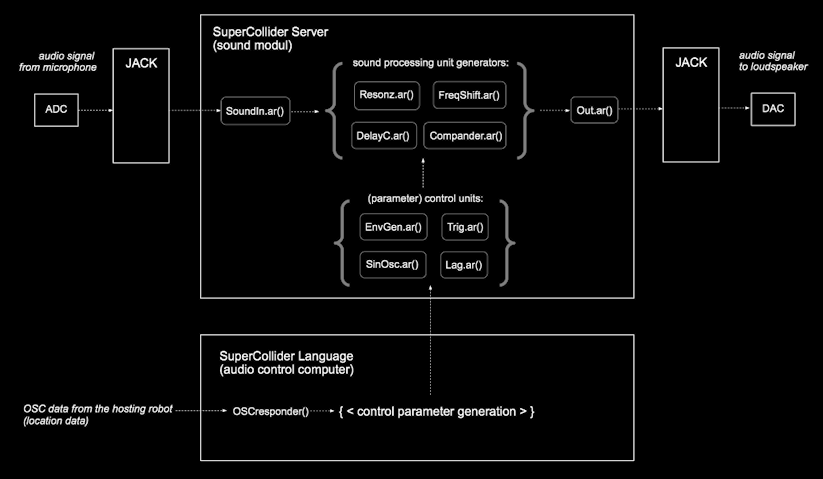
Die Signalverarbeitung wurde mit der in der Satellite-CCRMA bereits vorinstallierten Audiosoftware SuperCollider realisiert, mit deren Hilfe wir verschiedene Klangbearbeitungsalgorithmen (patches) programmiert haben. Diese patches haben das jeweilige Mikrofonsignal sowie die von diesem oder anderen Robotern stammenden Positions- und Entfernungsdaten auf unterschiedliche Weise zur parametrischen Steuerung von Filtern, Delays, Modulationen, Verstärkung usw. verwendet. Zumeist kam eine Form von moduliertem und bearbeitetem Feedback zwischen dem Mikrofon und dem Lautsprecher eines Soundmoduls zum Einsatz. Die verschiedenen Klangbearbeitungsalgorithmen konnten von uns vom zentralen Audiosteuercomputer aus für jeden einzelnen Spieler oder teamweise wie ein Instrument oder PlugIn aktiviert und gemischt werden.
Soundmodul aus Beagleboard-Computer, Mikrofon, Leistungsverstärker und Hornlautsprecher:
Software und Signalverarbeitung mit SuperCollider:
Vernetzung von Robotern, Soundmodulen und Audio-Steuercomputer: